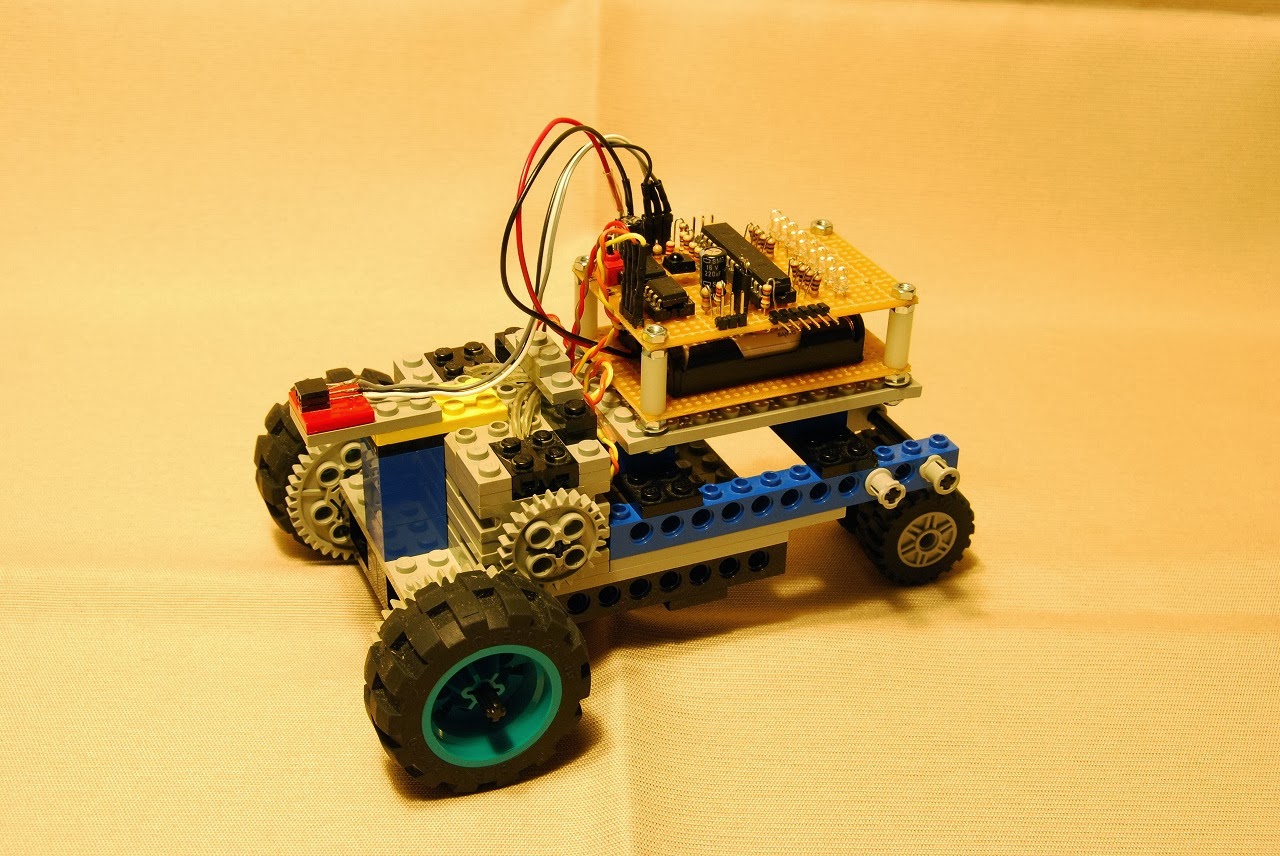
昨年、タミヤのミニモーターを使ってライントレースして走る2輪車を作ったが、レゴのモーターで同じコースを走る2輪車ができないかやってみた。
高さ方向はモーターのサイズがもろに効き、初代のほうが圧倒的に低いが、上からの投影面積はどちらも同じサイズでレゴの6*10のプレートに収まった。

タミヤのものは小さいモーターが車軸の後に左右に並んでおり、モーターの軸で車輪の外周を直接駆動する。一方レゴのものは、車軸の上部にモーターが前後に並び、歯車で駆動する。

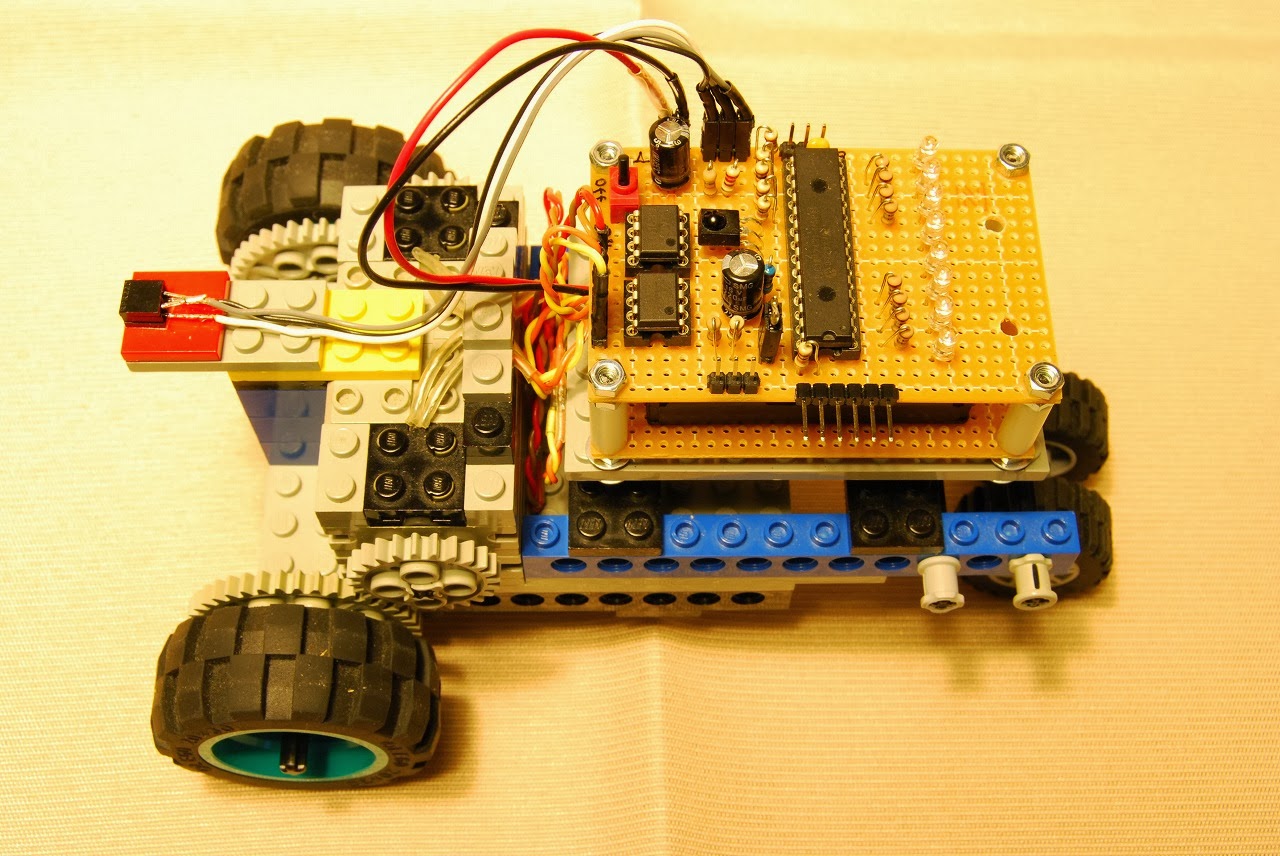
PICとモーター駆動ICは、初代は8pinのPIC12F1822とDRV8830、2代目は18pinのPIC18F1320とLB1639を使った。
12F1822は8pinで小さくて使いやすいが、プログラム領域が2Kwrods、RAMが128bytesと小さいのが難点。ライントレーサーのコードはギリギリで収まっている。レゴのほうはDRV8830の手持ちがなかったので、LB1639を使うこととし、IOのピンが多い18F1320を使うことにした。こちらはプログラム領域が4Kwords、RAMが256bytesでコードは余裕があるが、RAMがあふれそうになり、リンクのスクリプトを一部修正して使った。

トレース用のセンサーは反射型のフォトインタラプタRohmのRPR220。太陽光や白熱電球の赤外線に反応するのが難点であるが、小型で外付け抵抗2ヶだけで使えるので重宝している。

初代のものはモーターを輪ゴムで取り付けて摩擦で駆動しているが、この部分はかなり調整が必要である。レゴのほうは歯車で駆動するので駆動系の調整は必要ない。ただし、サイズを最優先したので走るスピードは初代よりもかなり遅い。
同じコースを走らせてみると、初代は走るのは速いが安定度はイマイチでふらふらしながら走ることが多い。レゴのほうはゆっくりではあるが、安定して走っていく。