
ライントレースに使った反射型のフォトインタラプタの出力がアナログ値であることに気が付き、これで逆立ちができないかトライしてみた。
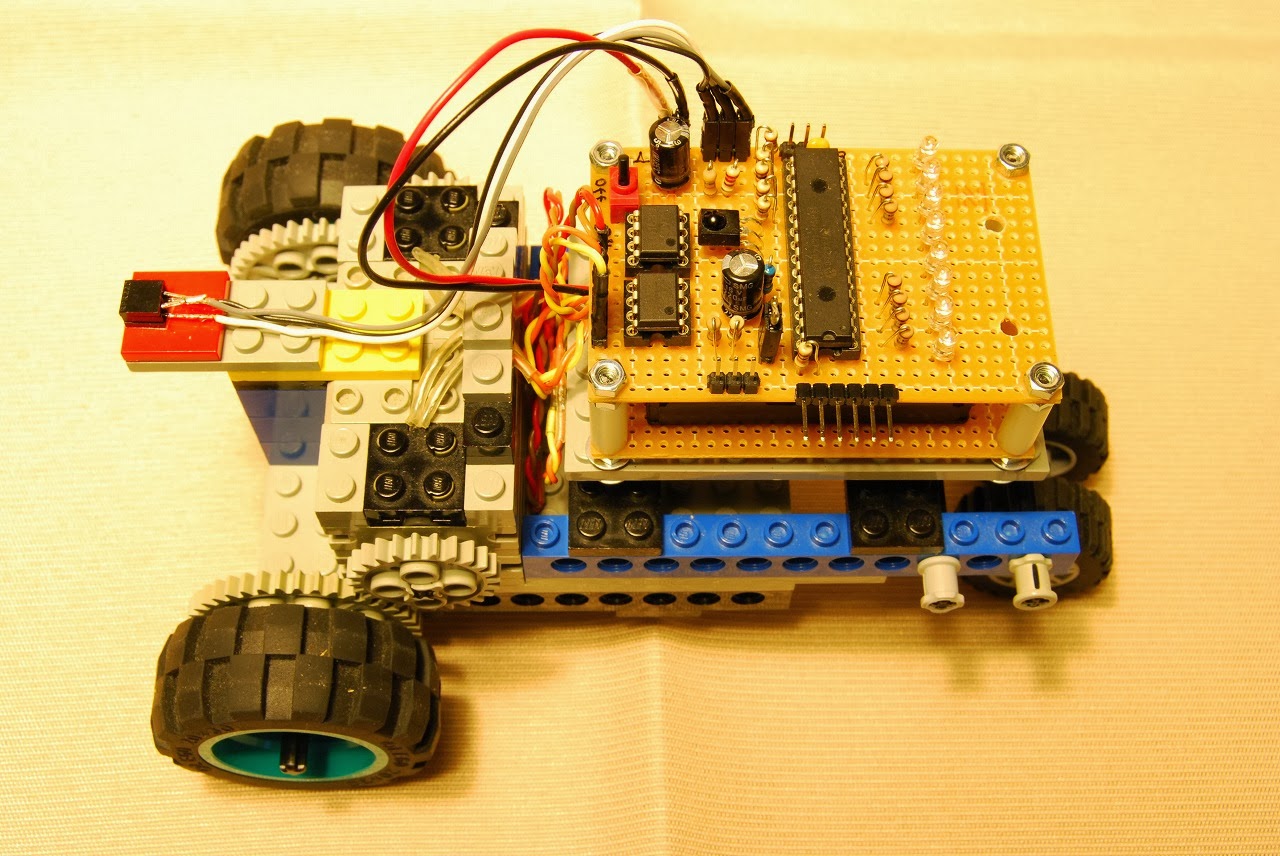
三輪車のボディは以前作ったものをほぼそのまま使う。PICのシステムは、往復運動で残像表示したときに作った基板を使う。電源は単4電池3本。
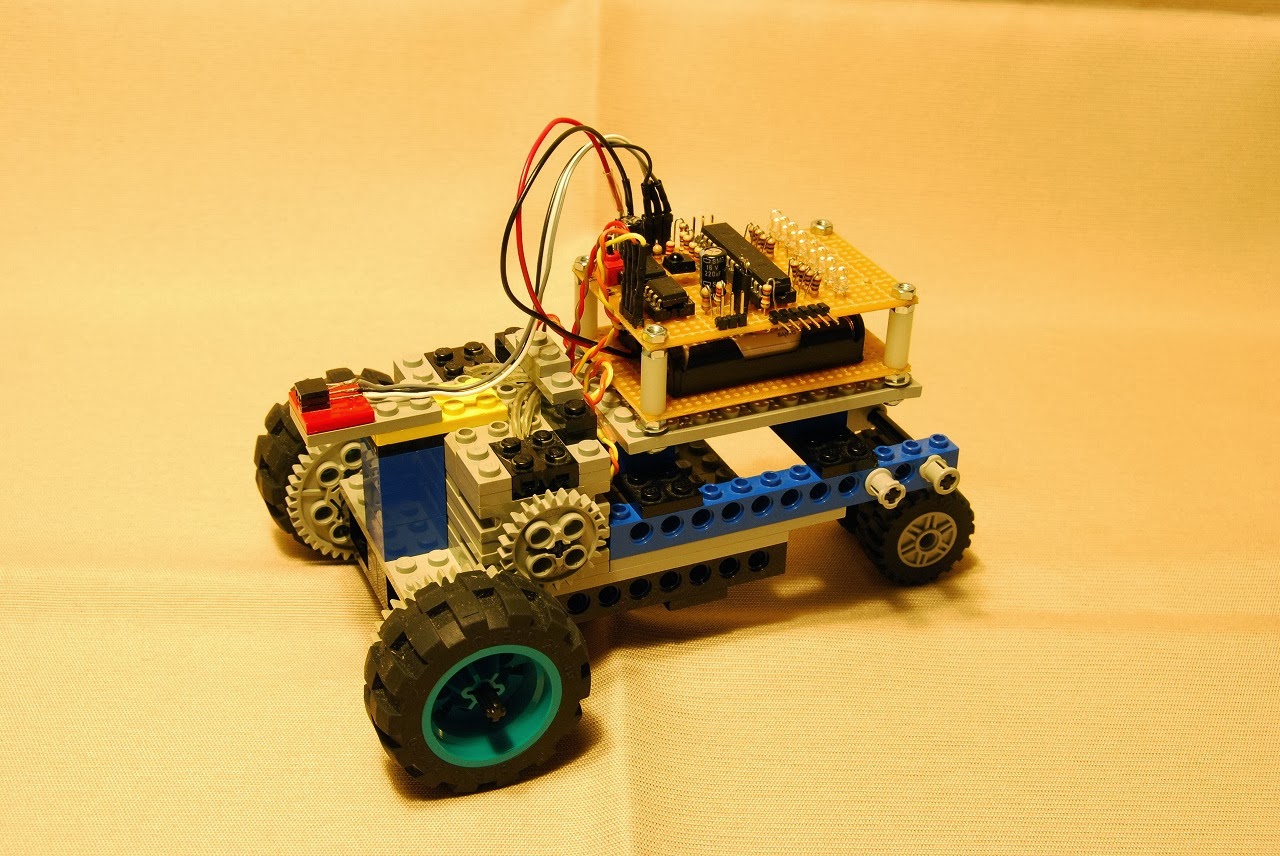
センサーは車体の前部、モーターの上に取り付けた。センサーと床の距離が小さくなると出力値が大きくなり、距離が大きくなると出力値が小さくなる。これで床までの距離を測定し、傾きを減らすように車輪を駆動する。

電源電圧が4.5Vなので、古いPIC18F2431を使う。モータードライバーはLB1639。残像表示用にLEDが8ヶついているので、センサーの測定値を7段階でLEDに表示する。
車輪の駆動は、モーター側24歯、車輪側40歯の歯車とした。
制御は、前回の測定値と今回の測定値を使ったいきあたりばったりの制御だが、動作間隔、駆動の強さをリモコンで調整できるようにした。
これで何度か調整してみたが、うまく逆立ちできるときと全くできないときがあり、ハードが悪いのかソフトのバグか電源が弱いのか、などあれこれ調べているうちに、昼間太陽光が明るい時とか、夜白熱電球をつけているとうまく動かないことに気が付いた。センサーは赤外線のLEDを光らせ、その反射光をフォトトランジスタで受けるようになっており、太陽光や白熱電球などで赤外線が光っているとそちらに反応してしまい、測定ができなくなってしまうことが判明。このおもちゃは太陽光が届かない部屋とか、夜蛍光灯の明かりの下、などでしか遊べないことがわかった。
0 件のコメント:
コメントを投稿