


クレーン車やフォークリフトでモーターが2つでは足りなくなってきたが、モーターを調達するめどが立ってきたので、モーターを4つ使える制御基板の製作を開始した。
PICはこれまでと同じPIC18F2431を使うことにした。モーターが2つから4つに増えたため、モーターの制御に必要な制御信号が増える。従来の制御基板は動作状態を表示するLEDを5つ持っていたが、これを2つに減らし、入・出力ピンはジャンパプラグで用途を切り替えるようにして、なんとか収まった。
モーターの数は2から4に増えたが、他の機能は以前のものと同じにしてある。
Piezoの入力は2チャンネル、Piezoの出力も2チャンネル分用意してある。
2つ同時に使うことも考え、モーター用の電池基板も新規作成した。
LEDの数が少なくなったのでデバッグの手間が増える可能性があるが、赤外線でPCに情報を送ることができるので、これでデバッグすることにする。
ハードの製作とデバッグがほぼ終了したので、久しぶりにブログに書き込むことにした。
以前のソフトウエアからの変更点は、赤外線の入力をメインループで監視しながら処理していたのを、今回は赤外線入力の変化で割り込みをかけて処理するようにしたくらいである。
ピエゾ入力による割り込み処理、ピエゾ出力、赤外線リモコンの入力、赤外線出力、モーター駆動などの動作確認を行った。
最後にフォークリフトを新しいコントローラで動かし、問題なく動作することを確認した。
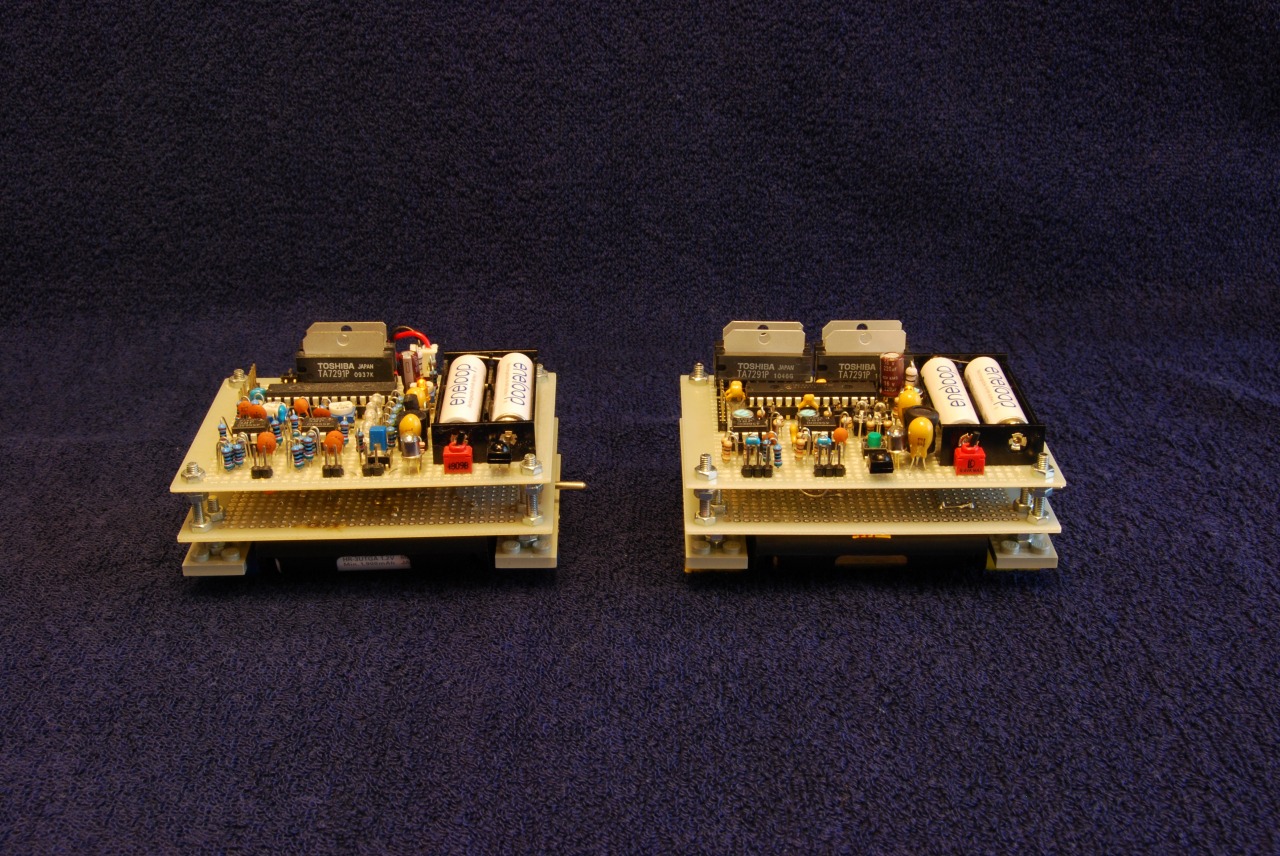
写真はいずれも右側が新コントローラ、左側が旧コントローラである。見掛け上の違いは、モーターを駆動するTA7291Pが4つに増えたこと、LEDが減ったこと、ジャンパプラグがついていることなど。
0 件のコメント:
コメントを投稿