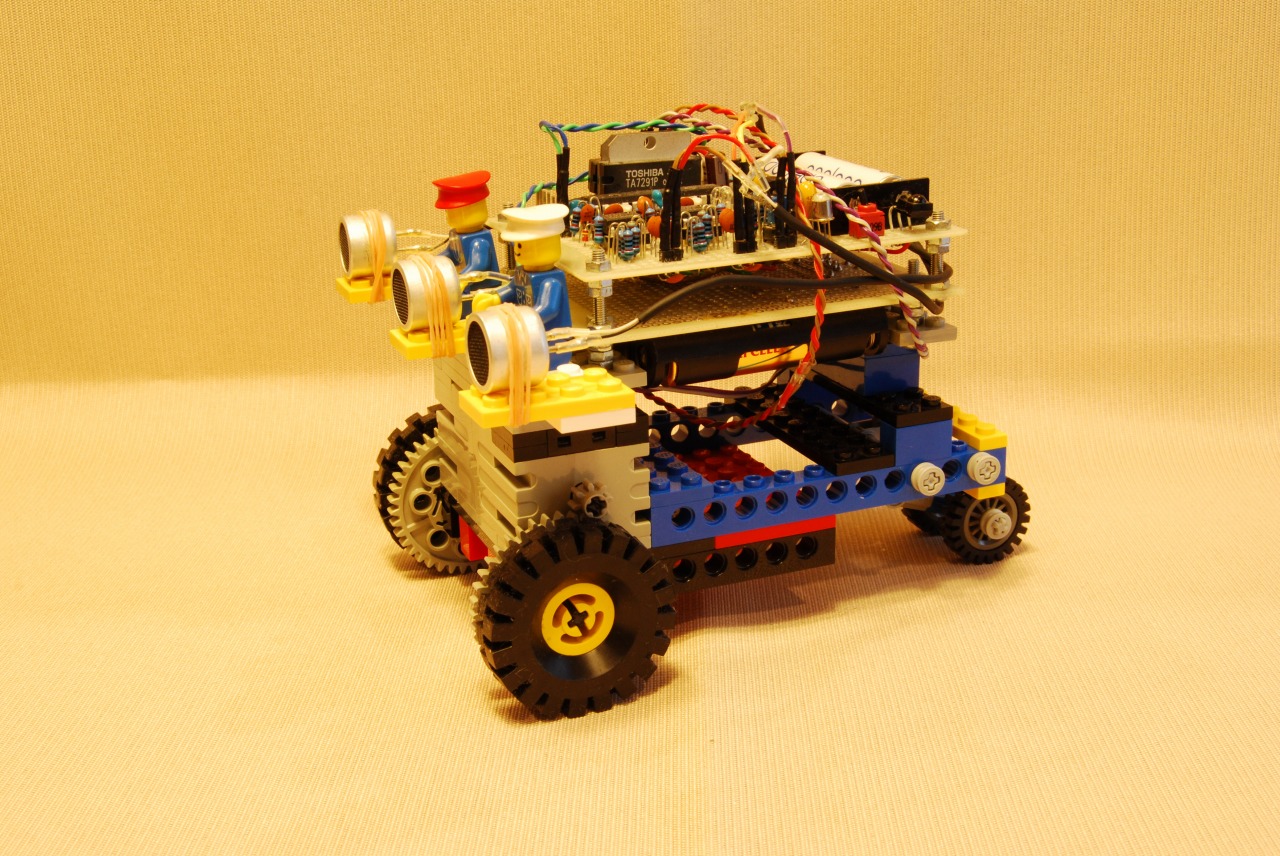
クルクルつながりで、クルクル回って動く3輪車を作った。
クルクル回転しながら目標の方向に進んでいく。前・後・右・左は、ボディが回転しながらほぼ直線的に目標に向かっていく。右回転・左回転・上回転・下回転はボディが回転しながら、進行方向も回転する。
ボディの回転角度を測定するため、最初はジャイロの角速度センサを使ってみたが、角度を求めるために積分する必要があり、ここで誤差の影響が大きいのかうまく角度を求めることができず、車輪の回転数を測定するよう変更した。フォトインタラプタを左右の車輪の歯車につながるもう一つの歯車に取り付け、ここで回転数を測定する。
制御の仕組みは、ボディが90度回転するごとに、次の駆動方向を決める。
たとえば、前に進む時は、最初の90度は左の車輪を前進させてボディを右に回転させ、つぎの270度までは右の車輪を後退させてボディを右に回転させ、最後の360度までは左の車輪を前進させてボディを右に回転させる。
右回転など、方向が回転する場合は、制御を約100度毎に行うようにした。ボディが右回転していれば、進行方向も右に曲がり、左回転していれば左に曲がる。
前進と右方向は右回転しながら進み、後退と左方向は左回転しながら進むようにした。
こうやってまじめに作ったものであるが、動きはバカバカしい。
自分で操作していても、どちらに進めようとしているのかすぐにわからなくなってしまう、、。